The Physical Intelligent Robotics Laboratory (PIRoL) aims to achieve generalizable and deployable intelligence for real-world robotics by integrating probabilistic estimation, data-driven modeling, and physically intelligent hardware design.
Our studies focus on three complementary research directions described below.
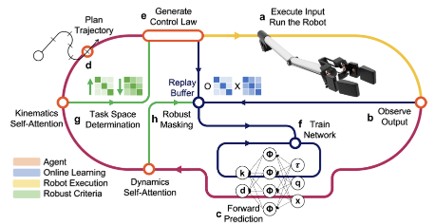
(1) AI-Based Estimation and Control
This research area explores robust state estimation and risk-aware control under uncertainty. We integrate probabilistic filtering, Bayesian learning, and adaptive control to enable robots to operate reliably even with limited or noisy data. Our methods emphasize explainability and real-time performance through Bayesian inference and safe model-based reinforcement learning.
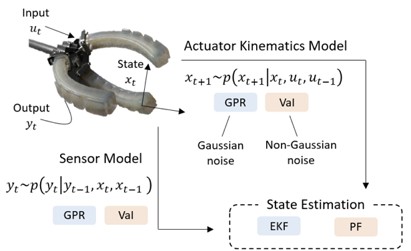

(2) Statistical Data-Driven Modeling
We investigate statistical and interpretable models that generalize from extremely limited datasets. Our work combines physics-informed priors with data-driven structures (so-called grey-box modeling) using techniques such as Gaussian Process Regression (GPR), Bayesian Neural Networks, and meta-learning. These approaches provide calibrated uncertainty estimation and improve the reliability of robot learning in uncertain environments.


(3) Physically Intelligent Hardware
This area focuses on embedding intelligence into the physical design of robotic systems. We develop hardware architectures with built-in sensing, actuation, and compliance to minimize control complexity and improve adaptability. Through optimal sensor placement, morphology optimization, and material design, we aim to create systems that express embodied and physical intelligence by design.
